

vendor-unknown
KK Multicopter Flight Control Board V5.5 Tripcopter Quadcopter Hexacopter - RS037
KK Multicopter Flight Control Board V5.5 Tripcopter Quadcopter Hexacopter - RS037
SKU:RS037
In stock
Couldn't load pickup availability
- For Bulk Order Click Here
- Need Customer Support?
- Free Delivery Above 999/-
Note: In case you receive a damaged or faulty product, please return it in the original box with all foam and packaging. Returns will not be accepted if further damage occurs due to improper packing.
If you order a product that is currently in Preorder, and the price of that item increases in the future, you will be required to pay the difference in price.
For refund/return/replacement, call us at +91 95995 94520 or email us at support@rees52.com
Delivery Time
Delivery Time
- Delivery time with the Express Shipping option is 2-3 working days, and with the Standard Shipping option is 5-6 working days. It varies based on location, reliant on courier services.
- Delivery time if the order item is on Preorder Status is 15-20 working days.
COD (Cash on Delivery)
COD (Cash on Delivery)
- For COD you have to pay extra charges of Rs 350/- before the shipment. (We will share the company QR Code, UPI ID or Account details for the same)

- KKOsprey (2 Rotor)
- KKTricopter (3 Rotor 1 servo)
- KKQuadrocopter (4 Rotor + configuration)
- KKXcopter (4 Rotor x configuration)
- KKSexycopter (6 Rotor)
- KKYcopter (6 Rotor Y configuration)
Description:
The KKmulticontroller is a flight control board for remote control multi-copters with 2,3,4 and 6 rotors. Its purpose is to stabilise the aircraft during flight. To do this it takes the signal from the three gyros on the board (roll, pitch and yaw) and feeds the information into the Integrated Circuit (Atmega IC). This then processes the information according to the KK software and sends out a control signal to the Electronic Speed Controllers (ESCs) which are plugged into the board and also connected to the motors. Depending upon the signal from the IC the ESCs will either speed up or slow down the motors (and tilt the rear rotor with a servo in a Tricopter) in order to establish level flight. The board also takes a control signal from the Remote Control Receiver (RX) and feeds this into the IC via the aileron, elevator, throttle and rudder pins on the board. After processing this information, the IC will then send out a signal to the motors (Via the MI to M6 pins on the board) to speed up or slow down to achieve controlled flight (up, down, backwards, forwards, left, right, yaw) on the command from the RC Pilot sent via his Transmitter (TX). In the case of a Tricopter, one of the pin connectors (M4) will control a servo to achieve yaw authority. The v.5.5 has an Atmega168 chip on board and an ISP header which gives users the option to tweak and upload their own controller code.
Flight Configurations:
The KKmulticontroller can be used in several different flight configurations depending upon which firmware is loaded onto the chip.
These configurations are-
- KKOsprey (2 Rotor)
- KKTricopter (3 Rotor 1 servo)
- KKQuadrocopter (4 Rotor + configuration)
- KKXcopter (4 Rotor x configuration)
- KKSexycopter (6 Rotor)
- KKYcopter (6 Rotor Y configuration)
Mounting the KKmulticontroller in your multi-copter:
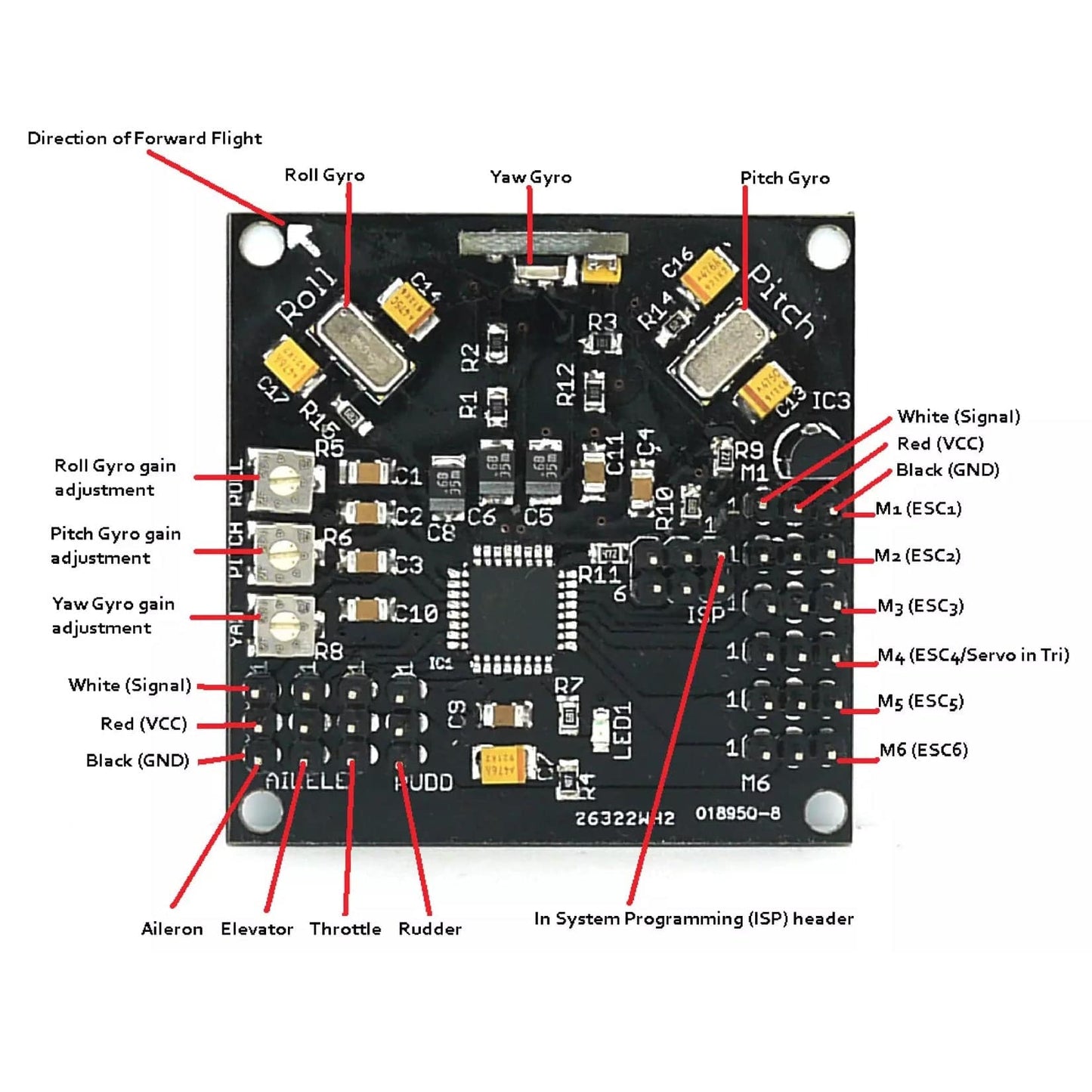
The v.5.5 KKmutlicontroller uses Murata piezo gyros that are less sensitive to vibration than SMD-type gyros, but it is still a good idea to mount the board on a vibration-dampening material. The board must also be mounted with the white arrow facing the direction of forward flight.
When connecting your Remote Control Receiver (RX) you must connect the white signal wire of the channels (CHI, CH2, CH3 and CH4) from your RX corresponding to the aileron, elevator, throttle and rudder to the inner pins on the board while the red (VCC) wires are connected to the centre pins and the black (GND) wires are connected to the pins on the outer edge of your board.
The pins marked MI to M6 are connected to the 3-pin BEC plug from your ESCs. They follow the same convention as the RX pins with the white wires connected to the inner pins, the red wires to the center pins and the black wires to the outer pins. The ESCs and the connected motors are plugged into the pins M1 to M6 in the following order depending on flight rotor configuration. Note also the direction of rotation for each motor. This is achieved by connecting the three ESC wires to the motors and swapping two of the wires to achieve rotation in the opposite direction.
Note:Configure the flight controller.
Package Included:
1 x KK Multicopter Flight Control Board V5.5 Tripcopter Quadcopter Hexacopter