







vendor-unknown
Complete guide for making Quadcopter using APM2.8 & controlling via FlySky FS-iA6 Receiver - QD001
Complete guide for making Quadcopter using APM2.8 & controlling via FlySky FS-iA6 Receiver - QD001
SKU:QD001
982 in stock
Couldn't load pickup availability
- For Bulk Order Click Here
- Need Customer Support?
- Free Delivery Above 999/-
Note: In case you receive a damaged or faulty product, please return it in the original box with all foam and packaging. Returns will not be accepted if further damage occurs due to improper packing.
If you order a product that is currently in Preorder, and the price of that item increases in the future, you will be required to pay the difference in price.
For refund/return/replacement, call us at +91 95995 94520 or email us at support@rees52.com
Delivery Time
Delivery Time
- Delivery time with the Express Shipping option is 2-3 working days, and with the Standard Shipping option is 5-6 working days. It varies based on location, reliant on courier services.
- Delivery time if the order item is on Preorder Status is 15-20 working days.
COD (Cash on Delivery)
COD (Cash on Delivery)
- For COD you have to pay extra charges of Rs 350/- before the shipment. (We will share the company QR Code, UPI ID or Account details for the same)







KIT INCLUDED:
- Quadcopter Frame – 1 set
- FlySky FS-i6 2.4G 6CH AFHDS RC Transmitter and Receiver – 1
- Propellers (with nuts and screws) - 2 sets
- 1000 Kv Brushless Motor – 4
- 3500 mAh Lipo Battery with Dean Female Connector – 1
- APM 2.8 Flight Controller with Frame (with Jumper wire Female to Female) – 1
- ESC 30A with Bullet connector and Dean Connector – 4
NOTE: The Purchase link is being given below in Hardware Required Section
HARDWARE REQUIRED
- Quadcopter Frame – 1 set
- FlySky FS-i6 2.4G 6CH AFHDS RC Transmitter and Receiver – 1
- Propellers (with nuts and screws) - 2 sets
- 1000 Kv Brushless Motor – 4
- 3500 mAh Lipo Battery with Dean Female Connector – 1
- APM 2.8 Flight Controller with Frame (with Jumper wire Female to Female) – 1
- ESC 30A with Bullet connector and Dean Connector – 4
SOFTWARE REQUIRED
MISSION PLANNER
http://ardupilot.org/planner/docs/mission-planner-installation.html
PIN DESCRIPTION
FlySky FS-i6 2.4G 6CH AFHDS RC Transmitter

Propellers

1400 Kv Brushless Motor

APM 2.8 Flight Controller

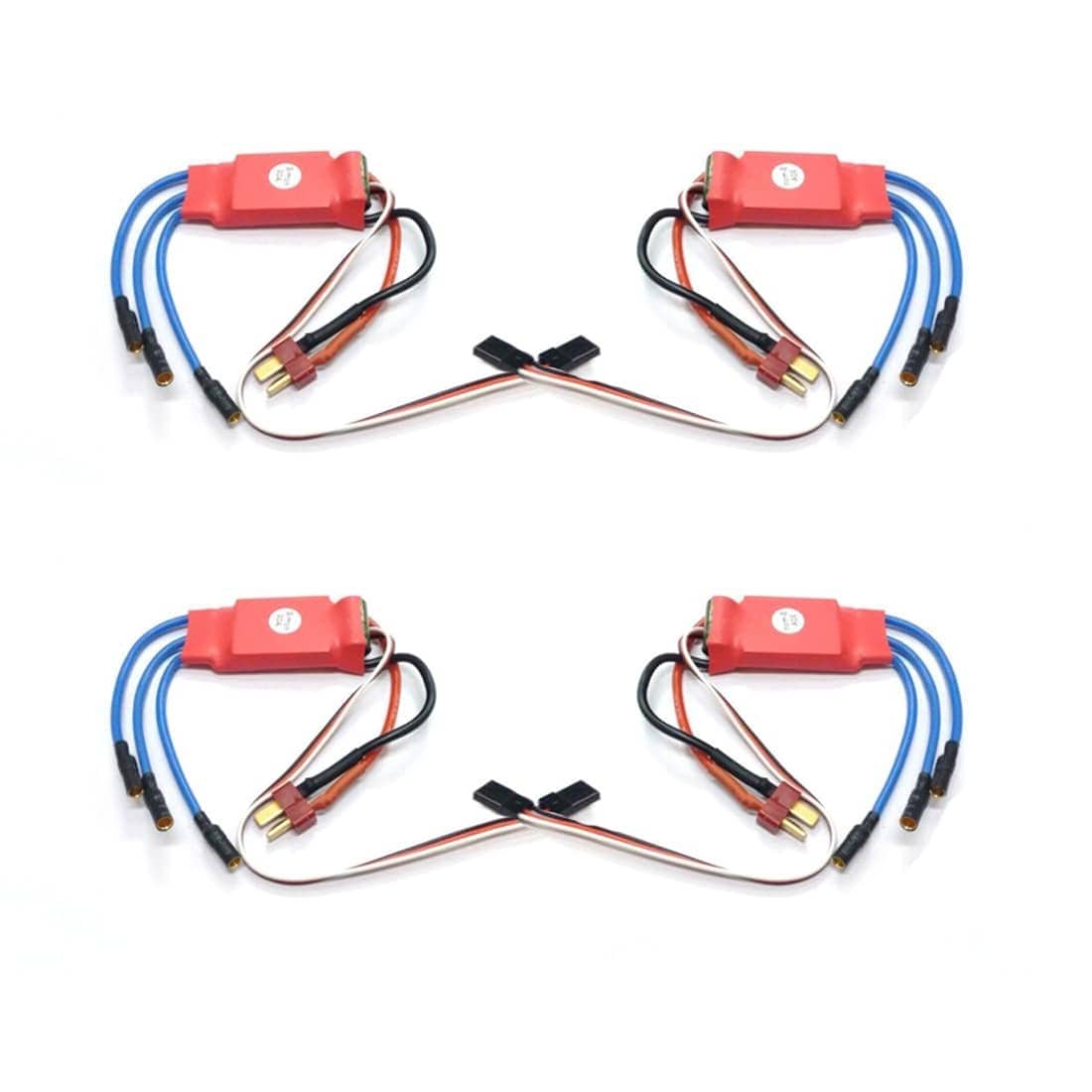
ESC 30A with Bullet and Dean Connector

ASSEMBLING OF THE QUADCOPTER
- To assemble the Quadcopter circuit. First, we will cut off the two pins (Dean Connector) of ESC module.

- We will use soldering iron for further connections of VCC and GND pins of ESC module on the Quadcopter Frame.

- Connect VCC (red wire) of ESC module with positive terminal and GND (black wire) with negative terminal of Quadcopter Frame.

- Now, follow the same procedure for the other three circuit connections.

- Connect XT-60 Female Battery connector with the Quadcopter frame for further power supply connections.

- Attach the other components of Quadcopter frame with the given circuit through Nuts and Screws. Repeat the same procedure for the other three components as well.

- Move the Jumper wires beneath the quadcopter frame.

- Attach the Quadcopter component with the main frame through Nuts and Screws.

- Attach Brushless Motor with the Frame through Nuts and screws. And repeat the same procedure for the other three motors.

- Now, we’ll do the ESC connections as follows:
- Connect the VCC of ESC with VCC of motor.
- Connect the GND of ESC with GND of motor.
- Connect the PWM/Signal of ESC with Signal of motor.
And repeat the same step for front facing motor.

- Now, we’ll do the ESC connections as follows:
- Connect the VCC of ESC with VCC of motor.
- Connect the GND of ESC with Signal/PWM of motor.
- Connect the PWM/Signal of ESC with GND of motor.
And repeat the same step for front facing motor.

- Place Ardupilot Flight Controller over the Frame.

- Assemble the frame for Ardupilot Flight Controller.

- Place and attach Ardupilot Flight Controller over the Quadcopter Frame through double sided tape.

- Connect Ardupilot Input Pins 1-5 with the Fly Sky FS-iA6 Receiver Channel Input Pins CH1-CH5 via Jumper wires (Female to Female)

- Now, place and attach Fly Sky FS-iA6 Receiver and Jumper wires over the Quadcopter frame via cable ties.

- Attach the Receiver Pins with the quadcopter frame via cable ties.

- Here are the given ESC of the Quadcopter Frame.

- Now, we’ll do the ESC connections with Ardupilot Flight Controller as follows:
- Connect the ESC-2 Pin with Ardupilot Output Pin - 1.
- Connect the ESC-4 Pin with Ardupilot Output Pin - 2.
- Connect the ESC-3 Pin with Ardupilot Output Pin - 3.
- Connect the ESC-1 Pin with Ardupilot Output Pin - 4.

- Attach adapter, back plate with the motor to connect propeller.

- And then attach spinner cap above the propeller. Repeat the same procedure for the other three propellers.

- Install Mission Planner Software.

- Go to the Option Flight Planner and connect Quadcopter with System via USB cable.

- Select the COM Port and Band Rate, then click the connect icon.

- Click on Initial Setup, and choose option Mandatory Hardware > Select option Frame Type > Select Quad X type frame.

- Click on Accel Calibration and choose option Calibrate Accel and Follow the given instructions given in the image below.

- Now, Place vehicle (Quadcopter Frame) on its left side and press any key.

- Place vehicle (Quadcopter Frame) on its right side and press any key.

- Place vehicle (Quadcopter Frame) nose Down & press any key.

- Place vehicle (Quadcopter Frame) nose Up and press any key.

- Place vehicle on its Back and press any key.

- After process click >Click when done >Calibration Successful.

- Click on Compass option and then choose options APM 2.5 (Internal Compass) > then click on Live Calibration > And click and follow the pop up message. Also, follow the steps given in the image below.

- You must follow every instruction given in the image below. Aim for white dots and point the autopilot north, and rotate around the pitch axis until level. Then, turn the autopilot 90 degrees, and rotate around the roll axis until level. This method should hit every white dot.

- After successful Live Calibration, new offsets for compass are being saved.

- Click on Radio Calibration > then click on Calibrate Radio option and Check all the buttons whether they are in working condition or not > then click on option Click when done.

- Click OK and move all RC sticks and switches to their extreme positions so the red bars hit the limits.

- Ensure all sticks are centered and throttle is down. Now, click OK button.

- Click on Flight Modes option and follow the instructions as given in the image below. Flight Mode 3 > Click on option At Hold.

- Now, click on Flight Mode 6 > select option Land. And then click on button Save Modes.

- Click on Fail Safe option and click OK button for given Pop up message. Go to Radio > Select option Enabled always RTL. And lastly click on Option Flight Data.

- Now, disconnect the USB cable from the Ardupilot Flight Controller.

- Connect battery with the battery connector of Quadcopter.

- To connect the remote controller, long press the left knob towards right bottom direction until the red light stops blinking.

- Now, your Quadcopter is ready to Fly.
LINK
You can also view the complete tutorial of Quadcopter. The link is given below:
https://www.youtube.com/watch?v=au0UJruUp4E
TROUBLESHOOTING
- ESC / Motor / Propeller combination
It is worth mentioning that in some cases FPV Drone build problems could be caused by components not matched properly, especially motor / ESC / propeller combination. Some combinations may activate the ESC overload protection or in worst-case scenario cause the motor or the ESC to overheat and burn.
- Motor Screw length
Take care to use appropriate motor screws depending on the arm thickness, in order to prevent the screws touching the motor windings and damaging the motor. Usually you will receive two sets of motor screws intended for 3mm and 4mm thick arms.
- Soldering
You should be sure that all your solder joints have the liquid silver look and are reliable. Bad solder joints may cause the FC, RX, ESC or Motor to lose power, prevent the signal from the fc to reach to the ESC or sbus signal from the RX reaching the FC.
- Proper Motor Order and Rotation
Check for proper connection between the ESC signal wires and the flight controller by following the flight controller motor order. When using 4 in 1 ESC double-check the wire order on the JSD-SH connectors, not all ESC/fc combinations have the same motor order.